

嵌入式硬件工程师,精通嵌入式微控制器应用开发,Android应用开发,物联网技术,擅长嵌入式系统功能设计开发,课程资源建设。曾参与“无线通信网络中超高速宽带协作传输关键技术”程序设计,荣获河南省科技进步奖。具有三年以上校内代课、企业师资培训经验。
主要方向:STM32、物联网、PCB Layout、FPGA、Linux、Android
嵌入式技术综合创新应用开发平台

平台为车型移动机器人与实训沙盘结合的阶梯化新型教学载体,按照“项目引领、任务驱动”的教学模式,采用模块化、积木式设计理念,可根据不同教学实训需求进行功能模块单元组合完成不同开发难度、不同系统框架与功能实验实训系统的自主设计与搭建。平台支持选配与定制不同性能与开发难度的核心控制板(Arduino、MCS51、Cortex-M0/M3/M4/A7、FPGA、DSP、MSP430等),系统标准功能单元支持汽车CAN总线通信,可完成真实汽车控制系统相关技术技能教学与实训。平台可选配与定制多种传感器、执行器、自动识别及创新应用模块完成功能扩展。支持选配全系列物联网通信单元完成无线组网与智能互联,可接入多种云平台(百科荣创教育专用云平台、百度天工、华为云、微信云等)完成云端数据交互与互联控制。平台支持视觉(图像分类、目标检测、图像分割)和语音两大典型AI方向应用开发,支持边缘智能和云端智能两类AI技术路线,可实现智能驾驶与车联网应用。平台充分融合了不同层次和不同专业背景的人才培养需求设计,完全满足电子信息、嵌入式、物联网、人工智能、移动互联、机器人等电子信息大类专业核心课程日常教学、实践实训及竞赛创新使用。
智慧交通与智能车联网
综合实训开发平台

平台以智慧交通和智能车联网为应用场景,集成智能交通灯系统、ETC系统、智能交互式公交站台系统、无线能源充电站系统、智能立体停车系统、智能停车场闸门控制系统、智能路灯控制系统、道路通行检测系统、声光报警系统、智能交互显示系统等多种智慧交通应用场景,实现自动驾驶智能车与智慧交通综合创新开发应用实训沙盘中的各个应用场景互连互通。系统针对智能车进行深度定制,以固定的协议报文进行数据交互,实现车、路、云三方协同,可在云端完成对现实沙盘中标志物套件运行状态的实时3D展示,以及智能行进路线、摄像头图像、车载设备状态的实时数据现实与交互。可满足自动驾驶、智能车联网、智慧交通等人工智能教学应用场景的模拟训练和创新开发。
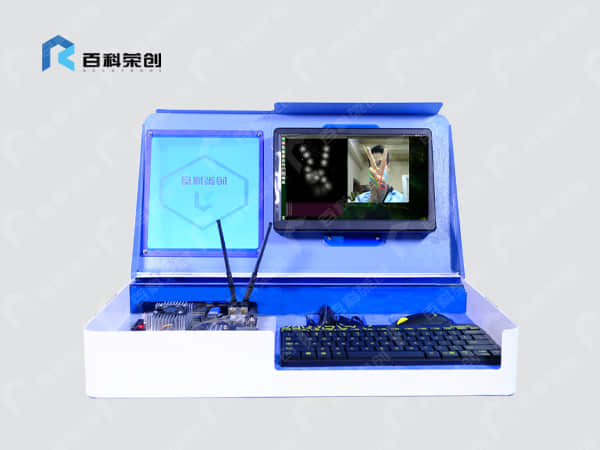
机器视觉综合实训开发平台

平台采用多核高性能AI处理器,配备专用的机器视觉显示器,预装Ubuntu Linux操作系统与OpenCV计算机视觉库,支持TensorFlow、Caffe等深度学习开源框架。配套图形化教学软件,可自主完成数据标记及模型训练。提供多种应用外设与丰富的机器视觉与深度学习实战应用案例,如图形识别与测量、物品分类、车牌识别、表情识别、口罩检测、多物体识别、姿态识别等,通过案例教学让学生掌握计算机视觉与深度学习的基本原理和典型应用开发。平台支持零基础逐步进阶到深度学习开发教学,提供体系化教学资源,包含微课视频、教学PPT、课程讲义、案例代码、工具软件等。配套多门独家在线学习课程,支持Linux操作系统基础、Python编程、OpenCV计算机视觉应用开发、机器学习、深度学习框架应用开发等课程教学与实训。
机器视觉工业应用开发平台

平台聚焦于智能制造领域工业视觉中的定位、测量、检测和识别四大方向应用,整合图像处理、机器视觉、深度学习技术、嵌入式与物联网技术、智能控制技术,实现字符识别、缺陷检测、尺寸测量、目标定位等功能。
机器视觉检测技术实训开发平台

系统包含工业级智能机械手、机器视觉边缘处理终端、机器视觉感知单元、机器视觉显示单元、机器视觉场景应用资源包等部分组成,可模拟人工智能典型应用场景,实现人工智能应用技术教学落地。系统支持机器视觉检测技术,包含智能识别、定位、抓取、分拣等功能,可实现机器视觉检测技术的工业化应用。系统配套工业级智能机械手,定位精度小于2毫米,支持图形化编程,满足如激光雕刻、机器视觉、五子棋、手持示教、绘画书写等二次开发。系统提供专属定制的色块模型、柱体模型、商品模型、废弃物模型、残次品模型、一维码/二维码模型、工件模型等应用场景模型,可模拟色块分拣、形状分类、尺寸测量、生产日期检测、垃圾分类、物体缺陷检测、物流分类、工件分拣、装配检测等工业应用场景。系统支持机器视觉核心技术线上课程,包含Python编程与应用、机器视觉应用技术、计算机视觉应用开发、Android AI应用开发、深度学习框架应用开发,配套完整的课程资源与教学资料,包含教学PPT、实验讲义、实验案例源码、开发环境及软件工具等。
智能语音技术实训开发平台

本平台聚焦于智能语音识别技术,提供基于MPU与高性能MCU的两种语音识别技术方案。 平台可通过MCU实现中英文双语离线命令词识别,利用MPU完成语音唤醒词训练及识别、语音识别与语义理解等智能语音交互功能。 平台围绕“智能音箱”和“离线语音命令词识别”两大商业案例主题展开,涵盖音频预处理、音频特征提取、神经网络模型训练和模型部署及识别四个部分教学内容。配套完整的实训教学资源,涵盖智能语音技术开发资源包和嵌入式MCU语音命令词识别开发资源包,完全满足人工智能相关专业关于智能语音识别技术的教学与实训需求。
嵌入式GPU人工智能开发平台
平台采用高性能GPU,可用于AI深度学习开发与教学。支持多种功耗模式切换,最大程度地满足不同场景下的性能需求。平台预装Linux开发环境,支持深度学习库、计算机视觉、GPU计算、多媒体处理等众多开发工具包,自带TensorRT、cuDNN、CUDA等人工智能开发软件环境。平台适用于智能机器人、视觉无人机、智能摄像机和便携医疗设备等智能终端产品设计开发。同时搭配体系化教学资源,提供神经网络模型从搭建、训练、转换、端侧设备部署到应用的开发实训教程,满足学校基础教学、课程设计、创新开发、科研开发等多方面应用。
无人车/智能驾驶技术应用开发平台

平台是采用Jetson Nano作为核心运算平台的最新一代产品。不仅继承了Jetson Nano控制器在深度学习领域的能力,又融入了ROS机器人操作系统丰富的生态,加速SLAM算法研究与无人车自动驾驶技术的应用落地。平台包含核心边缘算力单元,主要负责视觉处理和驾驶决策等,可支持同时高效处理最多8路1080P摄像头数据流,目前车载的两路高清摄像头,一路用于车道线检测,一路用于驾驶环境安全状况检测。平台提供图像处理能力分类识别、目标检测、姿势识别、图像分割.,支持多种深度学习模型,支持多种模型框架,支持单目与双目视觉图像处理,可实现自动驾驶场景中的行人、车道线、机动车、红绿灯、交通标识多种目标的识别。
智能ROS机器人创新实训开发平台

平台是针对ROS智能机器人的教学实训系统,融合激光雷达、陀螺仪、里程计、深度摄像头等多种传感器,支持扩展资源二次开发,采用麦克纳姆轮支持360度全向移动,支持多种动态智能路径规划算法,搭载SLAM自主定位导航系统,具有定位、建图、导航、动态避障、自动跟随等功能特点,具备在复杂环境下实现自主构图、并可自主导航的功能。平台支持ROS里程计反馈、IMU数据融合、姿态解算,支持电量计功能、电压检测、低压保护,支持线速度、角速度校准等功能。平台提供PID参数调试接口,可实现图形化PID参数调节,波形输出,Rviz数据可视化,工具集数据可视化。平台支持键盘遥控,PC无线手柄调速控制,无极转向控制,安卓APP摇杆或体感控制等多种交互控制方式。平台支持多种SLAM建图导航算法,包括Gmapping SLAM、Hector SLAM、Karto SLAM、Cartographer等建图算法,支持RTAB-VSLAM与ORB-SALM三维建图导航算法,支持选定区域建图、自动搜索建图、室内自动导航、动态避障、安卓APP建图等功能。 平台支持1080P高清图像输出显示、摄像头内参核定、WEB网页实时图像显示功能,内置OpenCV图像处理库,可完成人脸检测、边缘检测、光流算法、目标追踪、二维码跟踪、移动物体检测、自定义颜色摄像头巡线等机器视觉应用。平台支持TensorFlow、PyTorch、Keras等多种主流深度学习框架,可实现多种常用物品的识别,支持MobilNet-SSD、YoloV3、YoloV3-Tiny等常用目标检测模型,支持中英文双语种播报和多机器人协同编队等特色功能。
智能ROS机器人创新开发平台

平台是一款针对ROS系统开发的智能移动机器人教学设备,集成工业级编码器,具有精度高、载重大、动力足、续航长、扩展性强等特点。支持融合激光雷达、陀螺仪、里程计等多种传感器,方便二次开发,同时融合多种动态智能路径规划算法,搭载SLAM自主定位导航系统,具备建图、导航等功能特点,具备在复杂环境下实现自主构图、并可自主导航的功能。
最新动态
暂无信息
